

雷锋网 · 新智驾按:1 月 16 日,由雷锋网 (大众号:雷锋网) · 新智驾主办的 GAIR 硅谷智能驾驶峰会在美国加州 Palo Alto 如期落地。18 位中美顶尖自动驾驶行业嘉宾到场, 7 场主题演讲,2 大圆桌论坛,简直掩盖了自动驾驶相关的各个话题。 从明天起,我们将陆续放出嘉宾演讲与论坛的精髓局部,并将在后续的 《GAIR硅谷智能驾驶峰会》 特辑中送上整场峰会的全部内容。 该系列的第一篇,来自 DARPA 应战赛亲历者、Silicon Valley Deep Learning Group CEO Adrian Kaehler。
作为自动驾驶范畴相对的老兵, Adrian Kaehler 的职业生涯引见理所自然更长一些,他是 Giant.AI 和非营利组织 Silicon Valley Deep Learning Group 的开创人兼 CEO,担任 Applied Minds 副总裁和机器人与机器学习担任人 8 年,并曾在伊朗和阿富汗和平时期为 JIEDDO 开发自动驾驶车辆。 2005 年,斯坦福大学的车队夺得 DARPA 应战赛冠军,Adrian 便在其中担任计算机视觉零碎的开发。
Adrian 的演讲根本以 DARPA 应战赛为距离,前半局部,他次要引见了自动驾驶技术开展的几个重要节点与表现,包括 2005 年和 2007 年的 DARPA 应战赛,计算机视觉、深度神经网络的开展,之后,Adrian 则重点谈了后 DARPA 时期自动驾驶的开展。
DARPA 之前的自动驾驶
关于自动驾驶的开展来源,Adrian 直接追溯到了 15 世纪。1478 年,达·芬奇(Leonardo Da Vinci)设计出了预编程发条马车的草图,假如研发成功,这辆车就可由一个大型螺旋型发条弹簧驱动,依照预定道路完成车辆的自动驾驶。
90 年代,斯坦福的人工智能实验车(Stanford Cart)率先运用人工智能和机器视觉停止了生疏环境的导航。事先,激光雷达十分昂贵,并没有在自动驾驶中发扬突出作用。少数研讨者还是倾向于依托摄像头和计算机视觉方案完成车辆的自动驾驶,而自动驾驶的使用也次要集中在军事范畴。
转机点呈现在 DARPA 应战赛之后。
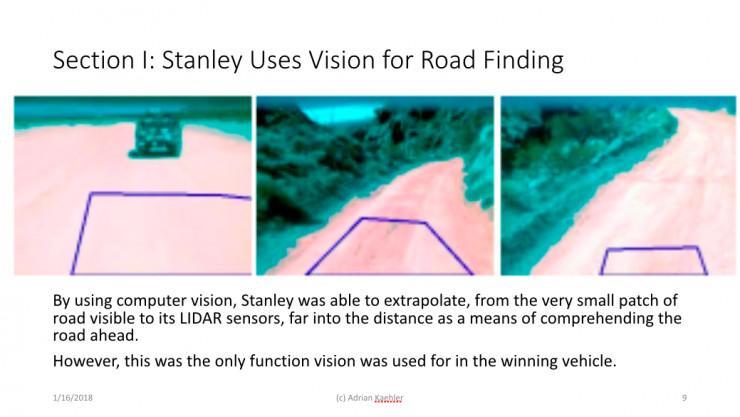
斯坦福大学的参赛车“Stanley”经过视觉停止路途辨认,经过激光雷达检测短间隔内的路途,并以此预测后方更远间隔的路况。事先,一些其它车队也在运用视觉方案,Oshkosh Defense 的“TerraMax ”就用了激光雷达和平面视觉停止妨碍物辨认。
2007 年 DARPA 城市应战赛中,车辆需求展现停车、途径跟踪和车辆交互等功用,车辆视觉变得更为重要,也更普遍地呈现在参赛车辆中。
我们都晓得,成立于 1999 年的 Mobileye 次要聚焦于 ADAS 零碎的视觉开发。他们的技术被用在了 DARPA 城市应战赛卡耐基梅隆大学的参赛车上,并且获得了十分好的成果。Mobileye 的晚期零碎可以提供车道线检测、车道偏离预警、妨碍物辨认和车距检测功用。2007 年,他们的产品曾经用在很多商用车辆上,包括凯迪拉克的 STS 和 DTS。
自动驾驶的第二阶段
2009 年,谷歌开端了自动驾驶研发,他们招徕了 DARPA 应战赛的很多重要参与者,包括斯坦福的少量人才,然后者不依赖视觉的传统也在谷歌的自动驾驶汽车上失掉了延续。不过,在很多义务执行中,摄像头仍是不可或缺的要素。
如今,激光雷达曾经成为自动驾驶技术的主流,不过,依然可以看到很多玩家运用计算机视觉方案。这之中,昂扬的本钱是很多人对激光雷达望而生畏的重要缘由。
高校的技术研讨曾经有了很大开展。DARPA 应战赛之后这些年,很多研讨者整合竞赛中的经历,将其中的技术转化成更坚实的实际根底。在计算机视觉方面,相似 Dalal 和 Triggs “HOG”行人检测的重要算法失掉改善,新技术开展,车辆辨认自行车或其它物体的牢靠性也在添加。
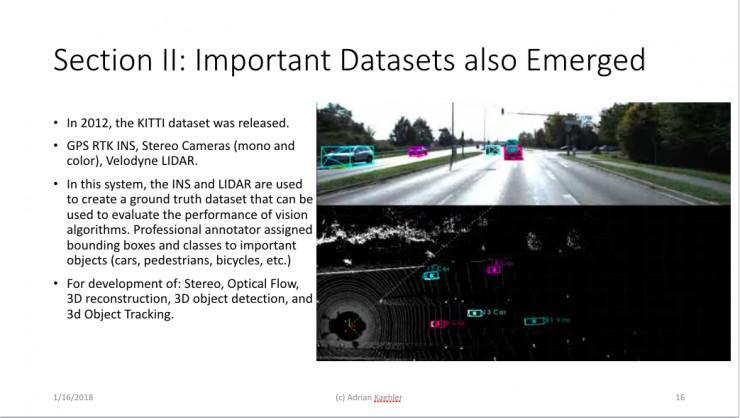
重要的数据集也在开展。2012 年,KITTI 数据集发布,它涵盖了 GPS RTK 惯性导航零碎、平面摄像头、激光雷达的探测数据。惯性导航零碎和激光雷达可以树立一个空中实况数据集,评价视觉算法的表现。专业的标注者则标定出重要物体(车辆、行人、自行车等)的边界框和目的物等级。这些技术都是开展平面零碎、光流、三维重构、三维物体检测、三维目的追踪的重要根底。
KITTI 这类数据集的呈现推进新算法更快开展,协助其停止更高效的比对,如今很多从业者就在努力处理这方面的成绩。
2012 年,“AlexNet”在一项重要的计算机视觉基准义务上打败了其它办法,让神经网络重新回归自动驾驶的幅员。并且,深度神经网络简直翻开理解决各种成绩的大门,在依赖计算机视觉的年代,这些成绩都被以为在几十年之内很难找到处理方案。同时,视觉方案的经济性也开端失掉史无前例的注重。一个摄像头最低只需 1 美元,但一个 64 线的激光雷达却要 7 万美金。
计算机视觉和机器学习迅速探究着这项技术的边界,并不时失掉新的打破,很多本来以为应该在很多年后才干获得的效果开端活期呈现。
下一个主题是 SegNet 联系和 Remapping。原始的 SegNet 次要被用于联系,深度神经网络从场景中学习,之后再对其停止解释。
YOLO 算法目的辨认也是十分重要的技术,可以辨认图像中的目的,在分类的同时预测边界框。它使用了深度神经网络与传统的概率统计技术,最新版本 YOLO-9k 可以辨认 9000 种不同目的物。
视觉的探究没有起点。深度神经网络为很多成绩提供理解决办法,Mask R-CNN 的先进算法也在提升,它将对象查找与每个对象的像素标志结合在一同,还可用于人体姿势的评价。
最初,Adrian 表示,虽然自动驾驶的成绩很难在短工夫内全部克制,但许多重要环节曾经失掉很好的处理,而这些已足够支撑这项技术投入市场。在其不断关注的计算机视觉方面,他也给出了本人的多项建议,这些建议,以及 Adrian 的 40 分钟演讲全文,雷锋网 · 新智驾都将在后续的 《GAIR硅谷智能驾驶峰会》 特辑中完好送上。
。
