
从2001年伊莱克斯开发了全世界第一款“三叶虫”,扫地机器人先后阅历了全自动扫地、开环部分规划、激光雷达导航等三个阶段。扫地机器人的技术难度次要表现随着流量往智能终端设备迁移,新的机遇“物联网商业社交时代”也将迎来,通过人的第六器官(智能手机)和智能设备终端的联网互动,从而改变了人的行为习惯和消费方式。线下流量通过LBS定位重新分配,又通过物联网终端智能推荐引擎引导到网上任意有价值的地方,至此互联网下半场拉开帷幕。在定位导航局部,从这一点来看,扫地机器人的这三个阶段辨别为盲扫、无记忆地建图扫和有记忆地建图扫。
不过,激光雷达只能树立立体的深度图像,且本钱不断居高不下,多年来迟迟未失掉普遍使用。而随着视觉算法和视觉计算处置器的开展,扫地机器人迎来了基于视觉辨认技术和AI算法的时代。
视觉导航是指应用摄像头扫描四周的环境,然后结合红外传感器,应用数学运算和几何、三角法测绘出房间的地图,以此来停止导航,并依据前后影像中各个地标的地位变化来判别以后的挪动道路,对其所构建的环境模型停止更新与调整。
目前,市面上运用Vslam方案的只要Dyson和iRobot,前者于2014年9月推出360Eye,后者于2015年9月推出Roomba 980。国际这几年也开端涌现不少做Vslam方案的初创企业,其中创建于2016年2月的SanKoBot(珊口智能)便是其一。与其他竞争对手不同的是,SanKoBot的Vslam方案拥有包括Vslam视觉、物体辨认、图像处置、人脸辨认等多种创新技术,兼具自主创新和产业落地才能,提供人工智能算法和全体方案。
基于Vslam开源算法,SanKoBot高度优化绝大局部功能。比方,完成了可以使用于弱光、弱纹理、强光、甚至疾速光照变化等一系列高难度的室内场景,打破了原有Vslam技术高度依赖于光线条件的使用局限。同时,搭载的“SKB HOME AI大脑”将图像中的物体停止辨认、分类记载,并规划最佳打扫途径,完成自动避障、进步打扫效率。
基于vslam+辨认技术机器人完成室边疆图和物品检测
去年10月,SanKoBot在香港发布了单目视觉模组,助力家庭扫地机器人产业晋级迭代,国际首个在普通芯片(R16无减速芯片)完成Vslam算法产品化的公司,成为同行努力效仿的对象,也奠定行业指导者的位置。

单目视觉定位模组和采用该视觉的扫地机
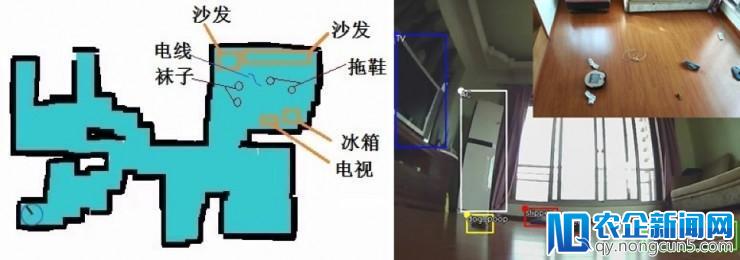
11月,SanKoBot成为全球率先完成室内物体实时辨认检测,使用在扫地机器人范畴可与Vslam同时运转。该扫地机器人一边画出室边疆图,一边做辨认检测,并在地图记载好物体地位。该方案是基于端的实时检测和Vslam,无需云辅佐或许减速芯片协助,是基于同一个摄像头且为单目。
12月,全掩盖带有途径规划算法+Vslam视觉定位的模组,以及零件进入量产,截止目前SanKoBot曾经给TCL等国际外知名企业供货。

机器人基于端的实时辨认技术(单目)
在成立不到两年的工夫里,SanKoBot能获得如此耀眼的成果,离不开面前成熟的团队。开创人兼CEO李磊有多年的国际外TMT行业经历和芯片产业经历,曾为国际知名以色列图像视觉公司Cortica中国的总担任人,也是多家硅谷和以色列创业公司的晚期投资人;结合开创人崔彧玮毕业于美国马里兰大学,获计算神经学博士学位,曾任硅谷AI公司Numenta初级研讨员,拥有2项美国AI中心专利,曾获William Hodos奖项;算法总监王子敬曾任Panasonic新加坡研讨院算法担任人,具有16年计算机视觉及AI研发、产业落地经历,其所设计的人脸检测、人体检测算法使用于松下监控相机及数码相机中。此外,技术、管理团队辨别来自于United Technologies、优必选、三一重工、ZTE、万国商业网等企业。
在李磊看来,SanKoBot的技术在设备上完成了相似于人类的眼睛和局部大脑的功用,扫地机器人只是落地的第一步。
随着视觉Vslam的技术逐步落地,SanKoBot于去年12月宣布已与国际一间知名公司达成协作,将其视觉辨认技术使用于城市智慧大脑。例如,当城市中摄像头数量约为50万个时,仅两周发生的数据就已到达8000T,这是一个巨量的信息。在如此海量的数据中找到某时段、某辆车的信息,经过传统办法,也许需求400人花上一整天的工夫才干找到。但经过SanKoBot提供的技术,将车的颜色、品牌、行人等数据在录制的时分就停止提炼和分类,存储在云端索引中。在其内搜索关键词、时段等信息,几分钟内就可以检索到后果,这将大大提升城市管理的效率。
去年6月,SanKoBot完成1100万天使轮融资,国金投资领投,王利杰pre-Angel,深圳朗科和鼎翠,IKEA等跟投。同月取得上海张江临港的政府支持以及数百万智能制造专项资金。目前珊口智能正在新一轮融资,用于研发投入和产品化商业化。
。
