
本文来源 Zdnet Wired,由白悦编译,原文来自 IEEE Spectrum,作者 Evan Ackerman & Erico Guizzo。 首发于机器之能 ( 微信大众号 :almosthuman2017), 转载请联络 jqzn@jiqizhixin.com 。
2011 年 2 月,NASA 向国际空间站发射 Robonaut 2 太空机器人。这关于身处休斯顿 NASA 约翰逊航天中心的 Robonaut 团队来说,是一个宏大的成就。
当然,Robonaut 并不是太空中的独一机器人,不过它的特别之处在于,是第一个去地球以外的中央执行义务的先进人形机器人。
在国际空间站上,机器人会与宇航员并肩作战,次要任务义务在于执行国际空间站中风险及反复的太空作业,以节省人手和工夫使无暇间站的其他宇航员可以从事其他太空研讨任务。
事情一度停顿地很顺利。机器人从泡沫封装中取出后,被安顿在命运号实验舱中。
2011 年 8 月,Robonaut 初次投入运用。不断到 2012 年,它都在停止着依据空中的近程操控执行按开关和清洁扶手的训练。
大约每一个月左右,宇航员就会设置一次 Robonaut,然后让它去空间站执行几个小时的研讨义务。人们希望 Robonaut 可以从一个实验项目转变成一团体类航天器中的有用帮手。
同人类宇航员一样,机器宇航员 Robonaut 也有本人的 Twitter 账号,下面写着:「快看看我,我在太空里呢!」
但在 2014 年,事情呈现了转机,NASA 决议展开一项较为复杂且颇具风险的晋级。
此前,送到国际空间站的 Robonaut 只是有一对胳膊、头部和躯干,如今 NASA 想要给它加上一双腿。
这样做的目地是让 Robonaut 可以愈加方便地在空间站里挪动。可以摆动的细长的腿简直可以算得上是机器人的第二双手臂,这样它们就能经过握住扶手在空间站四周挪动,功用将失掉显着的加强。
但是,这项晋级却并没有按方案完成,反而发生了一些宇航员临时以来无法处理的成绩。
在过来几年里,Robonaut 简直是毫无建树的。国际空间站形态报告显示,上一次机器人完成全部科研义务的工夫是在 2013 年 12 月。近日,NASA 宣布,Robonaut 2 将前往地球由空中的任务人员停止修缮。

(2013 年 1 月,Robonaut 在执行义务)
现实上,让 Robonaut 挪动是 NASA 对宇航机器人的临时规划中的一个环节。NASA 最后计划将 Robonaut 的操作才能分为三个阶段。
第一阶段是固定作业,2013 年底,Robonaut 躯干就成功完成了这项义务。第二阶段是舱内活动,在这个阶段,Robonaut 需求在国际空间站内挪动,因而引入了腿。而腿也是第三阶段舱外活动的关键,这一阶段要在站外的真空中任务,而这种状况下需求对机器人的重要硬件停止更多的晋级。
「空间站方案不断在扩展我们所能触及的才能边界,」NASA 约翰逊航天中心 Robonaut 项目经理 Julia Badger 承受采访时说道,「假如机器人可以走动,那么就可以去做物流管理,或是清算、修缮过滤器。挪动是我们开发和测试的下一个级别的功用。」

(Robonaut 的腿)
但是,给国际空间站里的 Robonaut 添加新的腿并不是复杂地把这些部件运送到空间站,而是要把它们衔接到 Robonaut 的躯干上。
腿部的装置需求晋级少量 Robonaut 的中心硬件,包括新的计算机以及衔接腿和机器人主处置器的接线,这其中还触及复杂的机械拆卸进程。更难的中央是,Robonaut 最后是一个在地球上运用的研讨机器人。Badger 说:「Robonaut 基本不是设计给宇航员运用的。它是一个实验室机器人,只是我们找时机把它送上了太空而已。」
即便是 NASA,关于这次添加腿部的晋级也很费力。
当被问及团队能否有决心时,Badger 说:「我相对不以为我们有决心,国际空间站次要是尝试新颖事物,我们在开发这些顺序的进程中学到了很多东西,也让宇航员完成了复杂的手术。」
她补充说,宇航员「做得很好」,机器人的成绩没有处理与宇航员有关,次要缘由在于硬件的复杂性。

(在国际空间站承受手术的 Robonaut)
NASA 估计,在地球上 Robonaut 团队需求 14 个小时才干完成的腿部晋级,需求破费宇航员大约 20 个小时的工夫完成,不过实践上最初用了 40 个小时。2014 年 7 月 16 日,这项任务开端了,并在 8 月 28 日成功完毕。
可是紧接着,NASA 约翰逊航天中心的 Robonaut 团队就认识到呈现了一些成绩。
8 月 29 日,宇航机器人只要局部通电,但人们无法在空中上看就任何遥感勘测信号。不久,经过固定一根松动的导线,机器人经过了检验,但在 12 月 17 日的又一次操作中(晋级后第一次用电动机对 Robonaut 回到当下汹涌澎湃的AI浪潮,正如所有的企业都被互联网化一样,所有的互联网企业都将 AI 化。而这些互联网企业中,也包含CSDN。同时,作为全球最大的中文IT社区,CSDN还有一个历史使命——为广大的互联网公司进行AI赋能。通电时),它的腿不能挪动了。
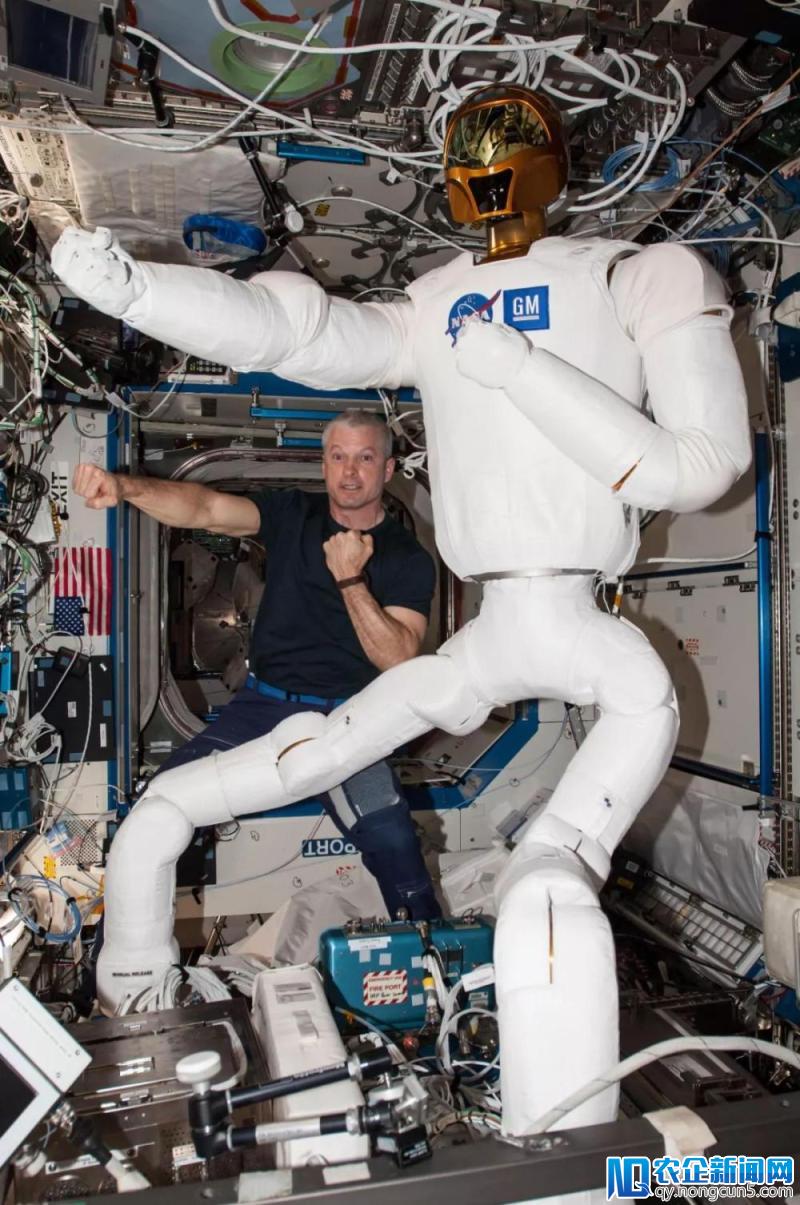
(2014 年完成晋级后,NASA 宇航员 Steve Swanson 和 Robonaut)
2015 年 1 月到 8 月,宇航员和空中上的团队记载了宇航机器人一系列不波动的行为,包括传感器毛病、通讯毛病以及反复的处置器锁定。到了 9 月份,继续的毛病诊断标明成绩出在了 Robonaut 处置器的电源上。
Badger 表示:「运用我们的操作窗口开端让计算机开端得到电力了,而且随着工夫的推移状况会越来越严重。经过一段工夫的电力循环状况会有所改善。但成绩是,这种状况是间歇性的,有时我们可以翻开计算机,有时计算机却会立刻生效,所以数据并不可信,这是十分混乱的。」
卡内基梅隆大学的机器人专家 David Wettergreen 专门研讨停止星际探测的自动化机器人。他解释说,机器人零碎的复杂性使错误的检测和预防成为了一项艰难的义务。
「关于复杂的零碎来说,假如运转不正常,我们可以对它停止调试和修复,就像你的车。但假如是一个很难了解的机器人零碎,如一个自主水下飞行器,或许说是那些把平安摆在第一位的机器,如一辆自动驾驶汽车,那就要在事前了解和最小化一切的生效形式,不然的话,机器人就需求有自我诊断和修复的才能。」他补充道,让事情更具应战性的是,像容错和毛病恢复这类技术都是需求少量理论的研讨范畴。
「Robonaut 必需结实又平安,所以零碎工程需求处于技术的尖端。」他说道。
国际空间站每日的总结报告出现了站上的宇航员和空中上的 Robonaut 团队为了掌握机器人毛病所作的努力。
到了 2016 年的时分,看样子 Robonaut 曾经被拆分且每一局部都被仔细地展开剖析了。
宇航员 Tim Kopra 装置了一台抓拍到规范明晰视频的摄像机,可以拍摄 Robonaut 操作零碎下行链路。他运用示波器、万用表和电流探头,经过别离控制器卡并在不运用控制器卡的状况下成功给 Robonaut 供电,协助指点空中上的团队处理这一成绩。明天搜集的数据将在空中上剖析,以确定电源毛病的缘由。
——摘自国际航空站的每日总结报告,2016 年 3 月 23 日
NASA 约翰逊航天中心的 Robonaut 团队猜想,两张控制器卡能够是肇事者,他们甚至把这两张卡运回地球停止了测试。但在实验室停止了检测后,卡片没有成绩。因而,还要持续展开搜索,团队开端反省每一个部件,包括机器人外部的少量电缆:
宇航员在 Robonaut 底盘上停止了毛病扫除。以前的毛病诊断标明,能够呈现成绩的两张卡曾经在空中上完成了测试,扫除了成绩。明天,团队初次在通电时失掉了 Robonaut 的良好回应。任务中 Robonaut 的指示灯与预期的一样。在尝试减小间歇性毛病形态时,团队执行了各种电源循环。最初,团队扫除了其中几条电缆的毛病能够性。控制卡未从 CPCI[小型核心组件互连] 底盘中移除并坚持装置形态,一切电缆坚持衔接形态。团队方案剖析后果以采取下一步举动。
——摘自国际航空站的每日总结报告,2017 年 2 月 1 日
太空硬件在送往太空之前是经过了艰辛的设计、构建和测试的,但让人诧异的是,NASA 的机器人专家无法更快地完成诊断并处理成绩。
不过,宇航员们正在研讨的国际空间站 Robonaut 与约翰逊航天中心的其它五个 Robonaut 略有不同。Badger 表示,空间站 Robonaut 是一个 R2-B 模型,而地球上的机器人是 R2-C,后者是「相当重要的设计迭代」。而在成绩呈现的多年后,这些差别最终给出了成绩的答案。

(2017 年 2 月 1 日,宇航员 Peggy Whitson、Shane Kimbrough 和 Thomas Pasquet 修缮 Robonaut)
「我们花了很长工夫才弄明白是怎样回事。但最终后果是这个空间站机器人丧失了从计算机机箱到空中的链接途径。目前它正在寻觅另一个途径,而这使机器人渐渐退步。由于这个轨道上的机器人与空中上的机器人不同,所以没有空中途径就是一个错误,而且很难找到。」Badger 说。
这意味着,机器人的某些电路和处置器能够基本就没有电,而其它组件则因过大的电流而被烧坏。这个错误正在渐渐杀死 Robonaut。
来自卡内基梅隆大学的 Wettergreen 表示本人也遇到过相似的状况。他说:「接地回路的错误最后看起来与基本缘由有关,但却能够使电子设备呈现各种奇异的症状。调试需求很长工夫,由于成绩不容易重现,而且也不会常常发作。」

(「和 @AstroRobonaut 专家处理一些技术成绩停止毛病扫除,」宇航员 Tim Kopra 在 2016 年 3 月发推文,「但它还没有被完全修好。」)
2017 年 8 月,宇航员尝试装置了接地跳线,但并没有处理成绩。
Badger 解释说,他们想要加跳线的中央被一种特殊的密封剂掩盖,该密封剂可以维护敏感部件,使其防止由于国际空间站四周漂浮的异物所惹起的短路。宇航员要试图把这些去掉。
「这并不容易。」,Badger 说,「关于这些衔接能否无效还存在一些疑问,我们置信短少导线还能够惹起其它成绩。」
现实上,其它能够呈现的成绩也十分令人担忧。即便最后的接地成绩曾经被处理,Robonaut 团队也不确定能否还存在另外的成绩。
Robonaut 简直一定会因电流未经反省地流过计算机机箱而招致分明的退步,但团队也会尝试一下其它的方向。当 NASA 问他们能否想在接上去的补给义务的回程航班上用一些空余的货舱将 Robonaut 带回家时,团队赞同了。
依据他们掌握的设备损害水平,他们方案修复国际空间站 Robonaut 并将其送回站内,或将其换为约翰逊航天中心的另一个 R2-C 机器人,然后将其发送。
Badger 并没有提供将 Robonaut 送回国际站的工夫表。这是一个没有保证的义务,也是一个较大的应战。而且,他们的第二次发送能够还不能给机器人衔接腿。虽然 Badger 承诺,假如是这样的话,「重新整合将会绝对复杂。」

「@Astro_sabot(宇航员 Mark T. Vande Hei)和我预备好要把 Robonaut 带回地球停止维修和创新。」Joseph M. Acaba 发推文,并附上了一张 2 月 9 日的照片。「我们等待它的回归。」
2018 年 2 月,Robonaut 被打包送回地球。
Badger 说:「国际空间站是要尝试不同的事情。我以为 Robonaut 让我们理解了许多关于将来太空中人形机器人的知识。如今,我们将它带回家修缮,在不久的未来,我们也希望能再次把它送回去,持续协助我们完成探究最新技术的初心。」