
看点:作为机器人的终极形状,足式机器人将为将来智能机器人的研发打下良好根底。

直立行走让人类摆脱了森林的约束,开端运用并制造工具,这是人类智力退化的后果。因而,双脚直立也被视为人类区别其他植物的一个重要标志。但从均衡性来看,双脚站立要比四足行走难得多,那么人类为什么还要花大把的精神研讨双足机器人呢?
有人答复说:“为了像人”,这是由于古代的城市环境是由人类建造的,而研发机器人的目的就是替代人类停止反复性休息,所以“像人”对机器人来说非常重要。不过,所谓的“像人”指的可不是“看起来像”这么复杂,更多地是希望机器人能替代人类做繁重、风险等任务,甚至比人类做的更出色。
虽然目前已有不少机器人用于工业消费和生活效劳,但它们的挪动才能却真实让人难以恭维。不过人们没有保持机器人“像人”的追求,也有不少公司正努力让机器人学会两条腿走路,知名度最高的是波士顿动力的Atlas、本田的Asimo,前者凭仗出色的举动才能,迅速窜红为当红机器人。
智东西深化到双足机器人产业链,细心研讨发现,涉足双足机器人范畴的头部公司玩家曾经有14家之多,相关研讨机构也曾经有十数个,尤其值得关注的是,其中呈现了多家中国公司和研讨机构的身影,处在机器人研讨金字塔尖的双足机器人玩家都打得什么算盘,中国玩家扮演怎样的角色,本文带你一文看清。
“行走”的瓶颈在哪里?
从某种水平下去说,“像人”是一种仿生学理念,机器人名字里又占了个“人”字,自然会让不少研讨者走上双足机器人研讨的路途。但目前市面上的机器人,即使是四足、多足其运动才能仍是一大成绩,更不必说双足机器人了。那么成绩究竟呈现在那里了,是什么限制了机器人的“两条腿”呢?

从原理上看,双足机器人行走成绩可简化为,经过各种传感器获取机器人体态及重心变换的数据,再运算出合理无效的运动指令,然后再反应再运算。以这种思绪来说,即使思索到运动环境的模糊性即使比拟高,也不至于像如今这么蠢笨。
理想状况是,人类行走是多关节配合的举措,因而目前市面上大局部机器人都是运用舵机模仿替代人类关节,用铝合金或其他轻型高硬度资料来制造机器人的构造件,相似于人类的骨骼,从而来支撑机器人的全体。用轻型、有强度的资料制造机器人的顶板和脚板,模仿人类的胯部和脚掌从而来支持机器人的行走与波动。其中舵机由芯片控制,进而控制整个关节的活动,从而完成了对步伐的大小、快慢、幅度的调整。这其中既包括设计、资料等硬件成绩,也包括算法等软件方面的制约。
硬件研发方面,整个行业迭代速度太慢。由于双足机器人从构造设计到组装调试,都需求相当长的研发周期,也更烧钱,硬件是不能够像软件一样,写完顺序后直接运转就能及时失掉反应的。当然,最中心的成绩是详细的技术细节,比方准确的力控,都掌握在一些顶级的硬件厂商里,而它们不会将其像软件一样开源出来,小型企业资金和实力缺乏也无法下鼎力度停止研发,这也限制了行业的全体开展。
软件算法方面,最大的制约缘由是人类还不清楚行走的最根本原理,这与人类不清楚人脑任务原理是一样的。在算法方面,目前业内的做法是把复杂的行走成绩笼统,提取出来一个比拟复杂的模型,比方Asimo的线性倒立摆、Cassie的弹簧质点模型,然后基于对复杂模型的剖析,生成行走步态,映射回双足机器人上。但是这样的做法,显然只是一个复杂零碎的特殊解,还做不到应付任何状况的水平。
巨头领路,“双足”成为抢手话题
从全球的机器人研讨和市场状况来看,美国和日本拥有这相对的实力,可以代表着国际的先进程度,在双足机器人的研讨上,也以美日的研讨效果最为明显,而中国的双足机器人与中国的机器人市场一样,才刚刚起步。

要说举动才能第一强的双足机器人,一定有人说是波士顿动力的Atlas。而这款机器人则是由波士顿更早的Petman迭代而来,最后是为能模仿兵士在理想条件下对防护服的作用而设计的。事先Petman已具有均衡本身、自在行走以及弯曲身体的才能,甚至还能暴露在化学试剂的操作车间里作出各种对化学防护衣有压力作用的健美体操。

随后,波士顿动力持续在机器人运动才能上停止提升,以Petman为原型开收回了Atlas机器人。前段工夫在网上大秀后空翻的Atlas,实践上曾经是阅历了三次迭代的第三代产品,其身体外部以及腿部的传感器可采集位姿数据,来坚持身体的均衡。如今Atlas不只可在雪地等复杂路面行走,还可以稳稳地后空翻,运动功能非常优越。
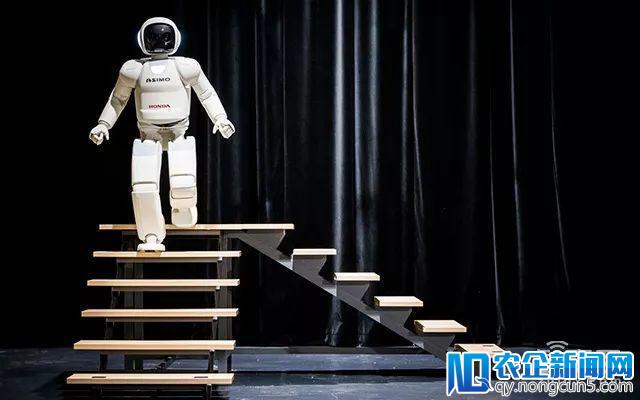
日本在机器人运动才能上也不甘逞强,2000年本田公司推出的Asimo外行动才能上就非常灵敏。它的行走速度可达9km/h。而晚期的机器人假如直线行走时忽然转向,必需先停上去顿一顿,看起来也非常蠢笨。而Asimo灵敏得多,它可以实时预测下一个举措并提早改动重心,因而可以行走自若,它不只可以停止“8”字形行走、 上台阶、弯腰等各项“复杂”举措,还可以握手、挥手,甚至可以随着音乐起舞。因而,Asimo也被以为是全球最早具有人类双足行走才能的类人型机器人。

2017年俄勒冈州立大学研讨团队发布了一款名为Cassie的新型步行机器人。只要下半身以及反关节的设计,让 Cassie看起来像一只无头鸵鸟。虽然“十指”纤纤,Cassie的步子走的可是稳稳的,因而取得了美国国防部初级研讨方案局(DARPA)的垂青,后者给予该团队100万美元研讨资金赞助。如今Cassie的研发团队已从俄勒冈州立大学脱离出来,并树立了本人的机器人公司Agility Ro我国这片创新热土正在发生一场全面而深刻的产业结构变革。botics——该公司近日刚取得了800万美元的融资。

国际的双足机器人研讨上,次要以学术派为主,机器人企业停止双足机器人研讨的并不多。在年终的CES上,优必选就推出了一款双足机器人名为Walker,仅从名字上就能晓得这款产品主打的是行走才能。Walker高1.3m,拥有两条自在度极高的腿,可以上下楼梯、全向行走,具有踢球、跳舞等多种互动运动才能。
成立于2015年的钢铁侠科技,也是国际双足机器人研发的典型代表,其研发团队来自于中国迷信院和航空航天所,在2017年的世界机器人大会(WRC)上,钢铁侠科技展出了ART双足大仿人机器人,并遭到国务院副总理刘延东、马凯的接见。

总体来说,双足大仿人机器人的风头不断被海内公司和研讨机构占据,国际次要以项目研讨为导向,在商业化范畴鲜有动态。不止于美国波士顿动力(Boston Dynamics),日本本田(Honda)等公司都在“人形机器人”项目上不遗余力地砸钱。
现阶段,人形机器人的使用场景次要以军工、航天等行业使用为主。在消费端市场,将大块头小型化是个不错的选择。桌面级人形机器人NAO在科研范畴广受欢送,其法国机器人公司Aldebaran被软银收买;国际Alpha系列机器人助优必选跻身进入独角兽行列。

在研讨方面,美国和日本的双足机器人研讨起步较早,目前机器人的波动性已不成成绩,次要外行动速度加大研讨。如卡内基梅隆大学的国度机器人工程中心,就曾研讨出一款名为“Chimp”的黑猩猩机器人,可完成行走、爬梯子甚至是开车等功用,可用于灾后救援。中国的双足机器人研讨也十分火,浙大熊蓉教授就曾带队研收回“悟”“空”两台双足机器人,而她们的团队还在往年2月,研收回四足机器人“绝影”。此外,北大工学院、哈工大、北京理工大学等国际知名大学都有团队停止双足机器人的研讨。

目前全世界对双足机器人的研讨次要集中在跨越垂直高度的妨碍物上,对程度跨越大尺度妨碍未作思索。程度跨越的难度在于如何调理好机器人的重心,使之远间隔跨越但不会倒,在此根底上还要思索如何用最小的涵道风机推力顺利完成举措。
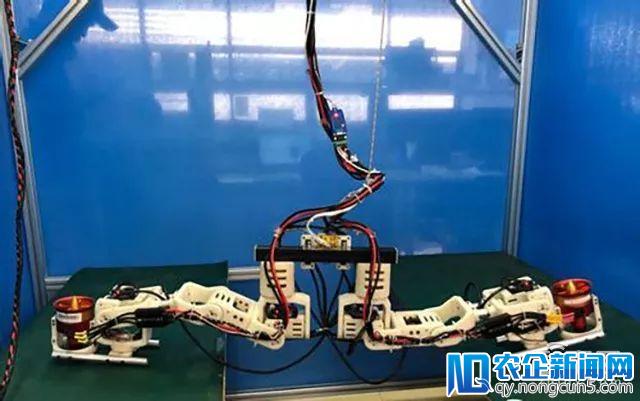
在程度跨越妨碍方面,近日IEEE Spectrum官网登载了广东工业大学自动化学院自控系副主任黄之峰团队的一项新效果,他们研发了一款名叫Jet-HR1的双足机器人,在其脚掌底部装置了涵道风机,使其可调理本身重力来维持均衡,甚至可用“一字马”来越过大尺度的妨碍物。
科研、展馆成市场主方向
从目前双足机器人研讨状况和市场前景来看,像NAO、优必选Alpha等小型双足机器人,主打儿童市场的陪伴和文娱方向,“跳舞”更成为其主打的一项功用。而关于大型的双足机器人,目前在市场上的表现,次要是在高校、科研院所、科技馆等场景中,为其研讨、教育、展现来效劳。
无论是完善的技术研发,还是冗杂的供给链管控,弱小的资金支持,双足机器人范畴都设有极高的门槛,不只要求电机、双足等复杂的机械控制零碎,还需具有环境感知和举动规划等才能,因而大型双足机器人的研发需求少量的资金支持。
双足机器人大多以仿人、类人机器人为次要形状,像Agility Robotics这样的只做半身双足机器人的企业并不多。而Agility Robotics公司称思索将物流和快递运输作为其落地的次要场景。智东西之前采访过钢铁侠科技的研发团队,并理解到目前大型双足机器人的落中央向次要是在科研机构和科技展馆,那么为什么双足机器人没有将效劳机器人作为本身落地的一个重要方向呢?
首先,效劳机器人的市场在前两十分的火爆,各地也呈现了不少夺人眼球的机器人餐厅,也有许多在银行、酒店等为主人停止引导的机器人,而从形状上看,大局部都是轮式的机器人。缘由是,一方面相比于双足机器人,轮式机器人的开发难度更低,本钱也低,因而有不少小型玩家涌入,市场也就失掉了扩展;另一方面,目前市场对机器人的需求还没有到达刚需水平,对交互要求极高的效劳机器人来说,目前的智能化开展尚未到达要求。因而,即使是价钱较低的轮式机器人在效劳机器人市场上都有待开辟,更不要提双足机器人了。
那么,有必要研发双足机器人吗?答案是一定的,无须置疑的是,仿人、类人的双足机器人一定是机器人的终极形状,目前的研发都是在一步步停止铺垫。虽然目前的双足机器人还停留在“中看不中用”的为难阶段,但其对科研的价值是非常重要的。同时,科研院所,科技展馆也在一定水平上构成了双足机器人现有的市场格式,随着国际科技热潮的掀起,仅在“中看”这一点上,双足机器人还拥有十分好的市场前景。
结语:足式机器人商业化之路“道阻且长”
无论是像波士顿动力Big Dog一样,波动性和动力零碎都非常微弱的四足机器人,还是Atlas一样的双足机器人,在科研上虽然获得了相当不错的停顿,但在商业化的路上,仍有相当长的路要走。其中最突出的成绩是, 足式机器人对举动才能了要求极高,而目前机器人普遍采用舵机模仿关节,而舵机越多,本钱就不时上扬,这也使得足式机器人的研发本钱较高。同时,由于足式机器人研发的思绪各异,技术壁垒也绝对较高。
从全球市场来看,足式机器人因其外行踪功用上仿人、仿生在研讨范畴深得研讨人员偏爱。而在市场方向上,效劳机器人方向被价钱更低的轮式机器人占据,小型的足式机器人尚能凭仗较强的运动性在文娱机器人范畴落地,但大型的足式机器人仅能在科技展馆等场景作为一种“摆设”。因而,整个行业急需转变研讨思绪,在加强举动才能的同时,将本钱控制在市场可承受范围内。
从国际外的研讨比照来看,美国、日本等工业强国,在研发工夫和投入上都比国际多,虽然短期内足式机器人无法在使用上迸发,但作为机器人的终极形状,中国的足式机器人研讨仍需与世界先列减少差距,为将来智能机器人的研发打下良好根底。