

往年的 CVPR,百度是钻石资助商,所以会场中的很多标牌上都有这家中国互联网巨头的身影。而且,在大会展览区,百度也有本人的展台,但这一次是其计算机视觉部门用来招徕人才的。
虽然雷锋网 (大众号:雷锋网) 新智驾并没有在展区发现百度 Apollo 的踪迹,但作为自动驾驶范畴的重要玩家,他们又怎样会出席这场囊括了全球自动驾驶范畴简直一切头部企业的 CVPR 大聚会呢?
百度 Apollo 在 CVPR 2018 上次要做了两件事情:
其一,结合 UC Berkeley 举行了一场自动驾驶研讨会(Workshop on Autonomous Driving-WAD)。 这事儿他们在往年 3 月份就做了预告,事先百度 Apollo 宣布正式参加 UC Berkeley DeepDrive 深度学习自动驾驶产业联盟,并发布自动驾驶数据集 ApolloScape。
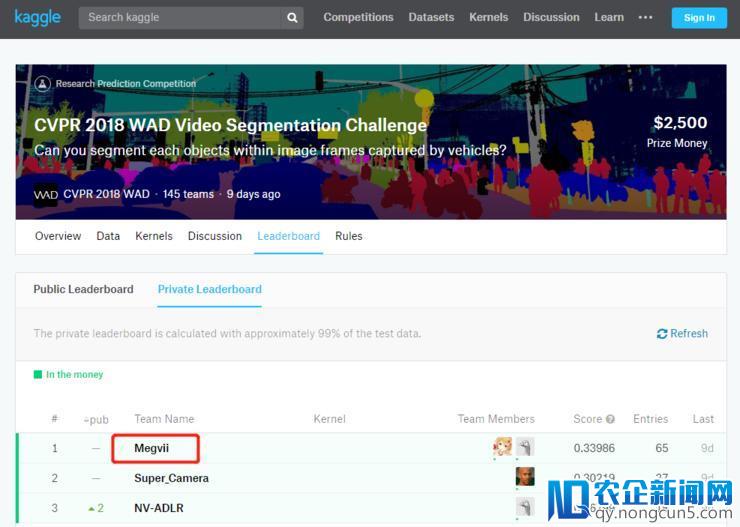
其二,基于其自动驾驶数据集 ApolloScape 展开了主题为“视频场景解析”的应战赛(Video Segmentation Challenge),并且事前在知名机器学习竞赛平台 Kaggle 上招募了参赛者停止比拼,一共吸引到 145 支国际外队伍参与。 目前,应战赛的后果曾经出炉,来自国际的旷视科技拿下头名,分享总额为 2500 美元奖金中的 1200 美元。
先来看看这场自动驾驶研讨会。
百度 Apollo 这次与 UC Berkeley 一道把很多人工智能以及自动驾驶范畴的大咖聚集在了一同,包括特斯拉人工智能部门主管 Andrej Karpathy、KITTI 数据集开创人 Andreas Geiger、Lyft 工程副总裁 Luc Vincent、Waymo 技术主管 Congcong Li 和 Chen Wu、Uber 自动驾驶部门(ATG)主管 Raquel Urtasun 以及 UC Berkeley 教授兼 BDD(Berkeley DeepDrive)研讨中心副主任 Kurt Keutzer 等等分量级人物。
这些人讨论的成绩次要还是关于自动驾驶的将来开展以及如何促进产业界与学术界的深化沟通。当然,自动驾驶人才的培育和保送一定是避不开的话题。
这一次百度 Apollo 力推的是其往年 3 月发布的自动驾驶数据集 ApolloScape。
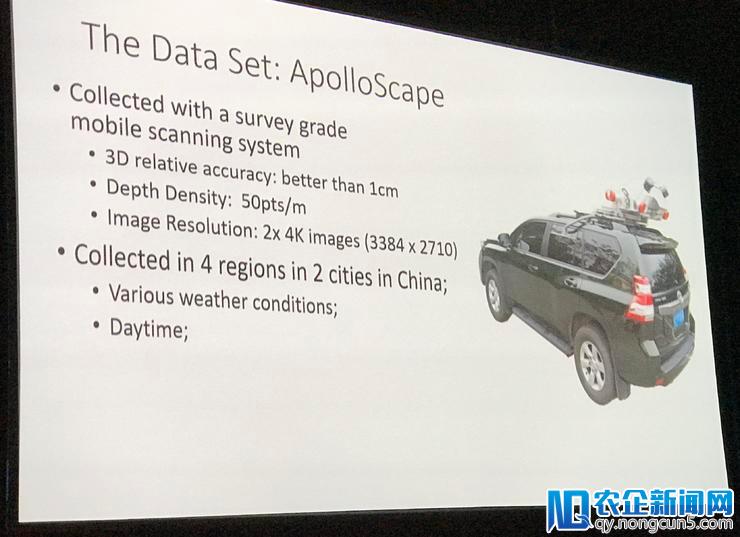
据雷锋网新智驾理解,该数据集曾经开放了 14.7 万帧的像素级语义标注图像,包括感知分类和路网数据等数十万帧逐像素语义联系标注的高分辨率图像数据,以及与其对应的逐像素语义标注, 并将进一步涵盖更复杂的环境、天气和交通情况,添加更多的传感器来扩大数据的多样性。
依照百度 Apollo 方面的说法,ApolloScape 的标注精密度曾经超越同类型的 KITTI、Cityscapes 数据集,也超越 UC Berkley 最新发布的 BDD100K 数据集。当然,这一说法是真是假只要运用过该数本次涌现的 AI、区块链和物联网热潮不同于以往,将对产业、社会和生活产生真正堪称“颠覆性”的变革。IT 技术人员需要全方位地“换脑”:对原有的知识结构进行全面刷新,全面升级。据集的开发者才有资历评判。

*自动驾驶地下数据集比拟(*表示第三方标注不计算在内)
再来看看“视频场景解析”应战赛。
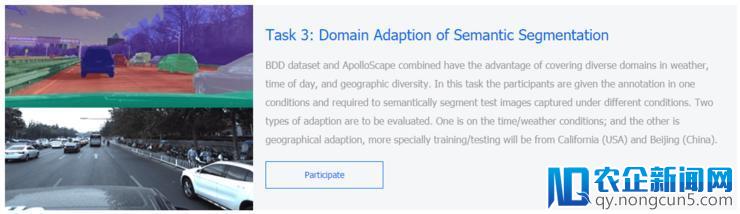
CVPR 每年都会有相关的应战赛在会议时期举行,这一次,CVPR 官方挑选了 4 项应战赛在 Kaggle 平台上线,吸引参赛团队停止应战。其中,基于 UC Berkley 发布的 BDD100K 数据集要举行 3 项应战;而基于 ApolloScape 自动驾驶数据集的应战则有 1 项,就是“视频场景解析”应战赛。
雷锋网新智驾从这项应战赛的官网查阅到的信息显示,这项竞赛上线曾经半个多月的工夫,一共吸引了 145 支国际外队伍参赛,其中,来自国际的旷视科技拿到了该项应战赛的第一名。据悉,应战赛获奖队伍会在后续停止效果分享。
雷锋网新智驾理解到,接上去 ApolloSpace 数据集将拓展更多类型、更多属性的数据:经过添加红外图像,协助自动驾驶算法更容易停止夜间检测;提取更稀疏的轨迹信息,用于对驾驶行为停止建模;经过众包形式采集平面视觉的驾驶特殊事情图像。此外,ApolloScape 将来还将添加美国的相关数据。
。