

*速腾聚创 CEO 邱纯鑫
雷锋网新智驾按:2018 全球人工智能与机器人峰会(CCF-GAIR)在深圳召开,峰会由中国计算机学会(CCF)主办,雷锋网 (大众号:雷锋网) 、香港中文大学(深圳)承办,失掉了宝安区政府的鼎力指点,是国际人工智能和机器人学术界、工业界及投资界三大范畴的顶级交流盛会,旨在打造国际人工智能范畴最具实力的跨界交流协作平台。
行业内越来越多人置信,打造一台人人用得起的激光雷达,需求对传统的机械扫描式激光雷达停止全固态设计,增加其上少量可挪动的部件。由于这样有助于激光雷达满足车规级和量产的需求。
作为激光雷达范畴第一梯队的玩家,速腾聚创(Robosense)在往年 1 月的 CES上对外展现了旗下的第三代 MEMS 固态激光雷达产品,吸引了很多关注。
作为深圳的外乡企业,速腾聚创这一次深度参与了雷锋网承办的 CCF-GAIR 人工智能与机器人峰会,这家公司既在展台上展现了其全线激光雷达产品,还有测试样车实践出现他们的 P3 激光雷达感知零碎方案。此外,速腾聚创 CEO 邱纯鑫还在大会的智能驾驶专场停止了主题演讲,次要从传感器的角度看自动驾驶的进阶。
以下是邱纯鑫演讲全文,雷锋网新智驾停止了不改动原意的编辑:

回忆自动驾驶历史,最早应该追溯到差不多近百年前,美国的陆军电子工程师 Francis 做的用无线电波去控制车辆的刹车、离合以及转向;然后就是 1956 年美国通用用一些预埋电缆配合车上装置的接纳器去停止车辆的控制;再有就是 1977 年的日本筑波工程研讨院开端运用摄像头传感器。到了 1998 年,意大利的帕尔马大学运用双目摄像头对物体停止辨认、导航,事先跑了 2000 公里,94% 的里程都是在自动驾驶形式下完成的,剩下 6% 左右在人工干涉下完成。
自动驾驶开展最具有代表性的事情是 2004 年举行的美国 DARPA 应战赛,有 25 支队伍按照兴味参与,当年没有一支队伍完成义务,竞赛总里程也就 11.78 公里。
事先大家评论说,这次竞赛之所以没有完成义务最次要的缘由是车辆对环境感知得不充沛,几吨甚至上十吨的车,碰到后面的小草堆就过不去。这也正面反映出纯视觉传感器的缺陷,它们要对强光对射、黑暗、斑驳光影的路途环境停止感知,将大大添加算法的难度。
新的打破呈现在 2005 年,斯坦福大学车队事先在车顶上装了多个单线激光雷达,这类单线激光雷达原来并不必在机器人或自动驾驶车辆上,而是用在工业方面,探测间隔并不远。但是,给车辆装上这类单线激光雷达后,车辆就可以完成义务了,这算是一个比拟大的打破。
Velodyne 在 2004 年的时分也参与了这项竞赛,在深化考虑之后,这家公司理解到激光雷达的重要性,所以就研发了 64 线激光雷达,这款产品至今曾经有十几年的历史。
后来,多线激光雷达成为自动驾驶方案的罕见配置,以致于 2017 年的时分,全新的奥迪 A8 上就采用了激光雷达传感器,成为全球首款装置激光雷达的量产车型。
激光雷达相较于摄像头的益处是它能失掉精确的三维信息,而且它本人就是一个自动光源,可以不受光照的影响,白昼和早晨都能正常任务。
这张图是激光雷达和摄像头的功能比照。
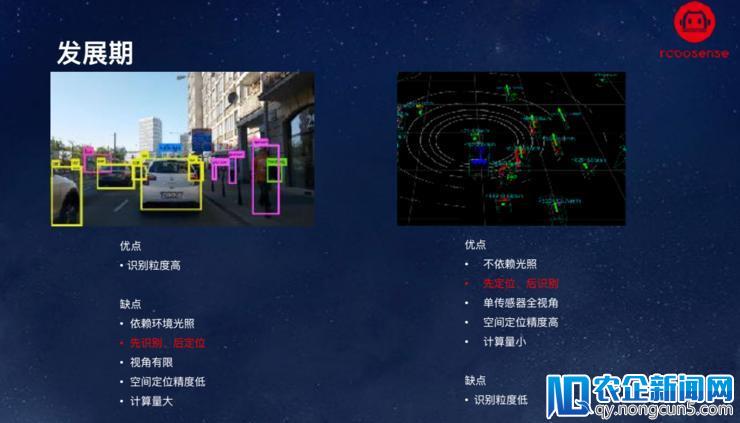
摄像头辨认的颗粒度比拟高,它能失掉一个丰厚的纹理颜色,所以它能做精密化的辨认,在这一点上激光雷达不如摄像头。比方目前的激光雷达没方法把车辆的品牌辨认出来。
摄像头最大的缺陷还是它受环境光的影响比拟大,而且它对数据的要求比拟高,无论是深度学习还是其它的机器学习的方式,摄像头对数据的质量要求都比拟高:数据质量好,它能够就辨认得好。
摄像头需求在数据库里有这个东西存在,才干辨认它;而激光雷达首先是对妨碍物停止辨认,然后再去分类。
这是速腾的激光雷达产品的点云图,它可以对四周妨碍物停止辨认,包括对路边沿停止检测,还能停止定位,定位精度大约在 10 厘米左右。

我们会有一些标注,把车分类出是卡车、小汽车还是行人、自行车。但是也就只能分出这几个类别,不能有更精密化的分类。
从 2016 年开端,自动驾驶进入了一个量产落地期,如今大家对落地越来越急切。
Waymo 是全球自动驾驶的领头羊,大家看它在 2016、2017 年和 2018 年对车的下单量从 100 辆到 600 辆增长到 2 万辆,这个增长还是很快的。萌芽期的时分自动驾驶开展都是以 10 年甚至 20 年为一个阶段;到了开展期,根本是按月算,到如今则是按天来算。
上个月月底,菜鸟发布了物流小车,他们说要在三年内投入 10 万台车;京东在6 月 11 日也发布了相应的设备并且决议落户长沙,而且下一个落地项目的选址也接近敲定。
这是我们总结的一个表,可以看到一切的车厂或许 Tier 1 的自动驾驶开展工夫表,根本上都集中在 2020 年到 2022 年完成 L3 或许 L4。L5 会大有不同,有些企业完成 L5 的工夫会定在 2025 年,而有些是 2022 年,有些则选择 2030 年。

这个工夫曾经很接近了,对我们这样的供给商来说,也是十分紧张的。由于如今间隔 2020 年也就只要两年了,而激光雷达的本钱紧缩和保证产品牢靠度,还有很多路要走。激光雷达的开展一定是朝着量产、低价以及波动性方向去开展。
固态激光雷达是将来的方向,如今激光雷达做上去,我们觉得 MEMS 是最容易完成的。它的优点是在于它的高分辨率、长间隔、车规级、易量产以及低本钱。
如今的 32 线或许 16 线激光雷达,分辨率再往下做很大水平上遭到物理体积的限制。但是 MEMS 激光雷达可以做到程度分辨率 0.09 度、垂直分辨率 0.2 度,往后能到达程度分辨率 0.1 度、垂直分辨率也是 0.1 度,再往后还能辨认出 200 米外的 10*10 厘米大小的物体。
探测间隔的长短取决于我们采用的光源是 905nm 激光器还是 1550nm 激光器,而且探测器的灵敏度也会发生影响,这里相关的要求还是挺多的。
在车规级方面,目前的 MEMS 激光雷达曾经在做车规级的认证,然后就是量产预备,它根本产品化之后,它的本钱也会随之降低。
大家看 MEMS 的任务原理,它就是采取多数的激光发射器,原来 16 线采取 16个发射器,32 线要采取 32 个发射器,64 线又则持续翻倍。MEMS 激光雷达不是采取发射器和接纳器物理的叠加,而是采取 MEMS 两个维度的振动,来提升扫描的线数。
前面能够还会做一些智能化的扫描,跟人眼的影射功用是一样的,MEMS 可以定向扫描,结合辨认算法做一些影射功用。
激光雷达的高分辨率和低本钱是将来的趋向,我们希望在 2020 年做到量产价钱 200 美金一台,进程中会给大家提供一些样品,这些样品的价钱还没定,但根本是朝着目的去做。
。